LL6 - Cross domain

Objectives
This living lab contains use cases from different domains. It will demonstrate the use of results from WP1 - WP5. The main objective of living lab WP12 is to demonstrate that multi-cores can be used to achieve significant advances beyond the state of the art. It will prepare the ground for future applications of mixed-criticality multi-core systems. WP 12 will tailor the generic cross-domain architecture of WP1 to the needs of this living lab’s application domains by software. The WP12 use cases mostly address mixed-criticality multi-core challenges that can be solved in a cost-efficient way by a combination of software and commercially available hardware like FPGAs.
Work package structure
The Cross Domain Applications living lab has 5 use cases from different domains. They contribute to these objectives:
- apply EMC² technology in medical imaging, seismic surveying, smart buildings, smart grids, and railway transport: apply new strategies for safety concepts, processing models, incremental certification in railway domain
- further develop and use computer vision technologies – or more specifically video streaming technology – to ensure that critical infrastructures are safe and reliable
- establish integrated tool chains and demonstrate efficient development for mixed-criticality multi-core applications: (semi-) automatically exchange tools at different stages in the design flow
- use model-driven development technology for MultiProcessor System-on-Chip: support translation of platform-independent models into different implementation technologies in order to handle technology obsolescence
This use case is about the signal processing and seismic processing which takes place on board seismic surveying ships. Up to 8 10 km long cables are dragged after a ship. There are tens of thousands of sensors and computing and networking devices in these cables. It is critical that a cable is kept in the right position, a control system governs this. At the same time massive amounts of data are registered by the sensors and sent over the cable network to dedicated embedded computing devices on board the ship.
T12.1 major objectives are
- to establish a tool chain for seismic processing on multi-cores and
- to formulate algorithms in a high-level language, and (semi)-automatically generate efficient low-level code
This use case will achieve
- a new Domain Specific modelling Language (DSL) which targets seismic processing
- a prototype code generator, which targets embedded multicore architectures
The results of this task will give European industry access to powerful tools for hardware that is available at highly-competitive costs.
The main goal of this industrial case is to further develop and use computer vision technologies – or more specifically video streaming technology – to ensure that critical infrastructures are safe and reliable.
It consists of several parts addressing:
- integrated tool chains for MPSoC HW/SW co-design, for parallel processing on multi-cores
- implementation of signal, video, and image processing algorithms on multi-cores
- body tracking in safety and security critical transport infrastructures like airports
- real-time situation awareness inside buildings in critical situations like risk of fire, structural damages, chemical or radiological threats
- biometric identity detection and authentication for access to restricted buildings
Objectives are
- to further develop and use computer vision technologies and
- to ensure that critical infrastructures are safe and reliable.
These tasks can lead in improvement an integration of the algorithms in real-time hardware implementation of low level algorithms for video processing, hardware for higher level tasks, combined hardware and software solutions or industrial applications of better quality.

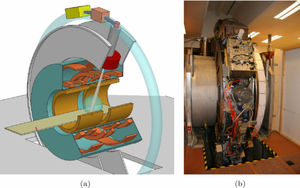
Task 12.3 targets the application of EMC² technology it the healthcare imaging domain.
In this domain very large images need to be processed in low latency. Complex image processing is necessary to keep all image information available, while at the same time increasing the information level of the images.

As very complex and configurable algorithms are in use, it is important to be able to develop the applications independent of the underlying hardware configuration. To prepare for evolution and to address the variability in products, it is necessary that the software can easily be ported to different underlying hardware configurations and the underlying heterogeneous hardware resources are transparently managed without application developers’ intervention. To ease portability, the demonstrators are built using domain-specific abstractions of the image processing algorithms.
The healthcare demonstration applies the EMC² technology in several healthcare situations involving medical images. The healthcare applications, served by the demonstrator, cover medical diagnostic and intervention support systems. In interventional situations real-time processing is crucial. For efficiency reasons we need to be able to host several applications, with diverse latency and performance requirements on a single chip or board solution. This means co-location of real-time and non-real-time processing on a single chip/board.

The algorithms that will run on the EMC² many-core execution platform involve massive image processing of different kinds (like noise reduction, image segmentation, image fusion etc.), but the background processing of the same piece of hardware deals amongst others with user interface, workflow support, decision support, administrative tasks, and (image) data storage and transfer.
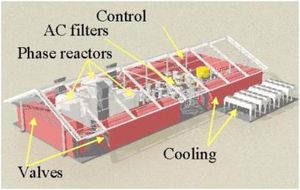
T12.4 will create a prototype application covering the business domain power system control. The system is required to perform a variety of computation intensive operations, with very high real-time requirements, on data coming in concurrent streams.
Objectives will be to establish a tool chain for embedded system developments on multicore SW and HW technologies. The aim is to (semi-) automatically provide an (almost) optimal solution for multicore SW / HW partitioning and mapping, to (semi-) automatically exchange tools at different stages in the design flow. Further goal lies in (semi-)automatically providing an (almost) optimal solution for multicore HW/SW partitioning and mapping.
To meet these challenges, this task will
- Build on results from the former or under execution projects (iFEST, MBAT) in terms of tool chain definition.
- Appropriately build extended tool adaptors
- Improve tool linking at the various stages during design
- Appropriately define and verify tool-chain orchestration support
- Propose and apply a method for late-partitioning and mapping of application on a multicore and FPGA platform.
- Progress towards a holistic approach to HW / multicore SW
- Demonstrate the optimality of the solution
- Demonstrate a suitable (potentially optimal) HW / multicore SW solution in control applications domain.
- Validate the developed integration technologies
- Demonstrate a full prototype tool-chain on an illustrative design example
This use case shall achieve
- a prototype implementation of the system using the integrated tool chain
- an assessment of the methods and tools used
Thus, the results of this task will give European industry access to powerful tools for hardware that is available at highly-competitive costs.
The objective of this use case is to tackle challenges in the railway domain posed by multi-core architectures.

The railway domain usually relies heavily on COTS hardware, which is steadily moving towards multi-core architectures. This trend demands new strategies for safety concepts, processing models, incremental certification and for capitalizing on additional performance.
EMC² will develop the roadmap of future generations of the TAS platform to overcome limitations imposed by the current state of the art. In particular:
- Fault tolerance services
- Single core hardware platforms
- Incremental certification and mixed criticality applications
- Train anti-collision systems
The use case will
- integrate new technologies into future generations of fault tolerant computer platforms for the railway domain.
- Thales’s TAS Platform will serve as a demonstrator to
- demonstrate EMC² technologies in train anti-collision systems (TACS).
Task 12.5 will achieve:
- Safety concept for multicore railway applications
- Novel replica deterministic programming models that allow for parallelism
- A virtualized TAS Control Platform, enabling mixed-criticality applications the same hardware cluster
- A new train anti-collision system