LL1 - Automotive Applications
Objectives
EMC² Living Lab WP7 on Automotive Applications is driven by the overarching business need to assure high product quality for automotive embedded systems facing an exponential growth in embedded systems complexity, while at the same time meeting tight cost constraints and facing the need to further reduce time-to-market. Taking into account the critical role of embedded electronic vehicular architecture, EMC² Living Lab WP7 Automotive Applications work package focuses on advancing the state of the art for automotive embedded systems to address this overarching business needs.
Increasingly the functionality of vehicles, e.g. passenger cars as well as commercial vehicles such as trucks and buses, is implemented in embedded electronics and software and the business and technical needs are derived from a broad scope of applications and standards within functional safety, active and passive safety, communications inside and external to the vehicle, regulations for emissions, fuel consumption, etc.
The driving sources for the business and technical needs in the WP7 are the automotive use cases within different technical areas. Common technical topics within the automotive Living Lab are:
- ADAS, Advanced Driving Assistant Systems
- Next generation of hybrid powertrains
- Infotainment and SW defined radio
- Next generation embedded electronic architecture for commercial vehicles
- AMSPS/PSS aspects: concept for MCMC electronics
- Software allocation and scheduling in a multicore based architecture
- Run time optimization of fast control algorithms
- EV and HEV energy recuperation
The latest generations of electronic architectures consist of an exponentially increasing number of control units. Typically a control unit is today tailored for the application which is executed in it. With a foreseen exponential growth of number of applications of various criticality levels, a continued growth of number of tailored control units would be needed with the today’s architecture approach. Typical close future needs within automotive architecture it to reduce the number of control units and we foresee that generic control units with high computational capacity and with the ability to carry multiple applications of different characteristics in terms for example of criticality level, real time performance etc.

Work package structure
In parallel to the developments around ADAS systems, Vehicle to Vehicle (V2V) and Vehicle to Infrastructure (V2I) applications will enter the market. In the context of ADAS systems this of applications can be regarded as virtual sensors with the V2X functionality sharing between vehicles. One example would be the ability to have up-to-date maps using the NDS standard, the creation of a local dynamic map and electronic Horizon all complementing ‘classical’ ADAS sensors. Although most of the ADAS, communication and MCMC technology piece parts are available, few experiments have been done to investigate their combined potential and challenges. The objective of Task 7.1 is to investigate and implement a system architecture that combines the potential of existing technologies around ADAS, communication and MCMC architectures to obtain hands-on experience in real-life trials.
Main topics include:
- Investigate existing and newly proposed MCMC architectures and their applicability for cooperative ADAS systems
- Extent this architecture with distributed (or cooperative) sensing of the environment of vehicles and infrastructure
- Execute trials to get hands-on experience
- Impose new insights and requirements to the WPs and standardization
- Use of existing software to enable large scale software integration
- Investigation of functional safety aspects of reusable functions for ADAS
Mixed criticality management in automotive embedded systems is one of the hottest topics in the field. Thus, a commercial vehicle include nowadays a platform for time-critical embedded control-units (engine control, ADAS, highly automated vehicles), a platform for entertainment (navigation and multimedia) and even a platform for smart phones communication. In a parallel line, the progress in standalone and cooperative control systems towards highly automated vehicles is becoming a reality in experimental prototypes. It is mandatory to propose adapted dependable solutions that take into consideration the heavy computational payload of such systems and adaptively combine it with the existing platforms.
This Use Case will go beyond the state of the art in Communicating ADAS and Highly Automated Vehicles through the design, development and validation of a solution optimizing the HW/SW resources of the multi-core embedded cloud proposed in EMC². A commuting scenario has been identified, where safety for driver/passengers and predictability for other road users will have to be guaranteed.
The objective of this task is to use EMC² architectures and tools in real-life tests, using current advanced sensing, navigation and co-operation functionalities for highly automated vehicles. As a result, significant contributions with real-life experiments will be made in this still immature but promising field.

The goal of this task is the tailoring and further enhancement of the EMC² technologies for the design and validation of next generation hybrid powertrains and e-Drives. Main topics of this use case include:
- Integration of multi-core technology in future hybrid / electrical powertrains in order to provide more computing resources for (a) improvement of existing functions and (b) new functionalities
- Combining two automotive controller units in one: Electrical and functional integration of high dynamic e-drive system controls with time based vehicle control algorithm.
Novel architectural solutions for advanced vehicles shall be designed to be compliant to ISO 26262 standard, therefore these solutions shall be modelled and analysed in conformity to ISO 26262 requirements. Objective of this use case is to run the analysis and the modelling of an architecture for ACC from a functional safety perspective, considering the implication of the ISO 26262 standard and the related verificationat concept level. The expected outcome is the evaluation at the concept (functional/technical) level of the ACC architectural modelling, compliant with the safety goals derived from the hazard analysis and risk assessment according to ISO 26262 standard. This outcome will enable a sustainable design of future product oriented solutions.
Critical and non-critical functionalities typically require different sets of skills and knowledge to be implemented. The application software development of mixed criticality applications can be made more efficient by choosing a suitable platform for this, for example choosing a spatial and temporal partitioned kernel, like the ones provided in LynxOS, INTEGRITY or VxWorks. Having a platform that supports both criticalities with little or no effort is crucial for the development of mixed criticality applications in the same platform, being the concept of platform a wide term (using for example distributed processing capabilities).
Automotive systems are composed of several systems of mixed criticality by nature. One cannot compare the level of criticality of functionalities of the Brake Control Modules when compared to the Navigation System, even though they can share hardware resources. Like these two systems we could name countless other examples like the instrumentation cluster, the engine control modules and the audio system, etc.
EMC² aims at an architecture for a service oriented architecture also re-using the results of the research project xLuna. This architecture enables hosting a non-Real Time Operating System, with the full plethora of libraries and frameworks, running as a low priority task of a RTOS. The RTOS will handle all the accesses to the critical and/or shared resources and will execute the critical functionalities, in the local HW or in remote HWs according with the developed SoA architecture for the EMC² project.
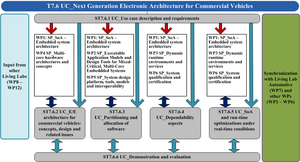
The goal of this task is to identify, apply and evaluate methods as well as tools to harvest the potential of multicores for mixed-critical applications in the automotive industry. Main topics of interests are to explore the full potential of multicores based on the needs and requirements of the next generation Electrical and/or Electronic (E/E) architecture for commercial vehicles, for example, trucks and buses. In particular, this task will focus on:
- Efficient E/E architecture, including communication aspects (logical and physical architectures, mapping between logical and physical architectures, qualitative and quantitative evaluation of alternative architectures) based on multicores.
- Efficient partitioning and allocation of functionalities as well as software on multicores, including separation among elements of different criticality levels and management of shared resources.
- Improvement of dependability (functional safety, reliability, fault tolerance, robustness, availability, security) by using multicores along with support for scalability, flexibility and adaptability.
- Improvements on AMSPS/PSS functions for next generation automotive electronics.
- Applicability of Service oriented Architecture (SoA) and run-time optimizations for real-time safety-related systems based on AUTOSAR.