LL4 – Industrial manufacturing
Objectives

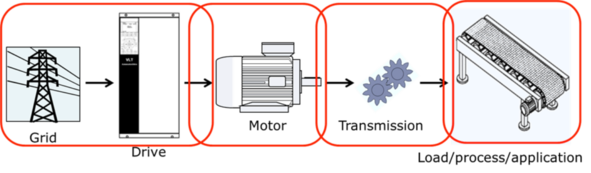
In the industrial application domain many devices communicate with each other to achieve an effective control of industrial processes. Embedded devices cooperated with many IT systems to make the industrial processes more efficient, to reduce waste or raw materials, and to save the environment. Most industrial processes place strict requirements on the automation systems. Electric motors and frequency converters that operate these motors are the backbone of an industrial automation system and provide automated solutions in various industrial domains.
Traditional way to achieve these complicated and partially conflicting requirements is to have multiple processors (MCUs, DSPs, and FPGAs) that allow separating safety critical functionality from non safety critical parts, hard-real time functionality from non hard-real time parts. While having separate hardware for each different type of functionality is straightforward and effective, the consequence is increased complexity of the hardware/PCB design, increased overall cost, increased size of the PCB, and decreased reliability of the hardware. But possibly the most difficult consequence is the lack of flexibility in the design making it harder and more expensive for a product company to target many different market segments in the industrial application domain.
To goal of the WP10 use cases is to change this situation. Multicore chips could be used to realize all requirements in one physical chip. Having multiple cores would allow still separating different types of functions where necessary. Additionally, the availability of additional cores would allow using innovative techniques (such as voting algorithms for safety) for achieving the critical requirements that previously have been economically in viable.
Work package structure
The objective of the use case is to
- to identify requirements, identify design and implement a new minimal drive platform that can combine hard real time performance characteristics with the safety requirements into a software capable of running in a single multi/many core chip and
- drive platform that can combine hard real time performance characteristics and the safety crucial requirements into a software which is capable of running in a single multi-core chip.
- to design electrical drive control, monitoring and diagnostics algorithms using multi-core platform features to support the particular application requirements. The objective is to design electrical drive control, monitoring and diagnostics algorithms using multi-core platform features to support the particular application requirements.
- Different binding time of the committing tradeoffs between safety level, real-time characteristics and other quality attributers will be investigated. Enhancement of safety processes and methods will elaborated to integrate security aspects To this end, the safety related concepts and runtime mechanisms developed in WP6 will be utilized.
- Multi/many core implementation over FPGA platform provides a cost efficient solution, as it replaces all the redundant control units with an FPGA platform.
Combining embedded systems with business application software leads to entirely new business models and considerable potential for optimizing production and logistics. This facilitates more resource-conserving production, greater individualization and a perfect fit of products at mass-production prices. However, such approaches have due to their complexity and dynamic to solve many potential security challenges. Especially the idea to offer security as a service will create the need to adopt multi-core nodes to the according security requirements. In particular, security services that provide communication authenticity / integrity / confidentiality are necessary. The foundation for realizing these services is a consistent and complete chain of trust to enable end to end security. Due to safety, reliability, performance, and interoperability it is necessary to base a chain trust on multiple roots of trust.
The objective of this use case is to develop and implement
- a flexible multi-core root of trust. This system shall simultaneously ensure strong security for sensitive data, fulfill increased performance requirements and provide enhanced interoperability for other system components
- hardware and software implementation and validation of the secure core and finally
- the integration of the identification/authentication security service into the tracking system (developed in task T10.3).
The tracking of people, goods and embedded devices is an essential application in dynamic systems, which adds valuable information to support other services and applications. Tracking mechanisms involves the integration of location technologies with centralized/distributed data management systems.
Multi-core embedded system are present at several levels inside tracking systems and their increase on power processing and lower power consumption make it possible to integrate multiple location technologies while offering distribute data processing. The integration of location technologies in real environments presents several challenges. Indoor and outdoor scenarios rely usually in very different infrastructure and technologies. Heterogeneous technologies must be used to estimate the location (radio frequency, image processing, ultrasound, magnetic properties) that offer different accuracies in the Macro (location in an area or room) to micro range. Wireless communication technologies are also integrated into tracking systems in other to gather the location estimation to a central management server that offers specific services to the final users or external systems.
Task T10.3 will
- demonstrate the integration of commercial RFID/NFC devices by embedding commercial multi-core processing units and developing custom firmware and software,
- present a study of future identification/authentication devices to be used for persons and gods in the scenario of industrial manufacturing,
- integrate location technologies based of radiofrequency devices and GNSS to provide additional information to the authentication decision algorithms as well as
- develop and integrate low-cost IMU modules to support the manufacturing and logistics processes with additional inertial sensors information.
The goal of this use case is to increase the performance capacity and speed of multi-view 3D inspection system based on machine vision while reducing the overall cost of the required embedded systems through the use of the EMC² paradigm and tools designed and developed in this project.
This system has very hard real-time restrictions. The 3D inspection system is able to combine a number of images taken of an object acquired while it is in free fall of the same piece, compose the 3D image, and compare it with a correct model previously generated from supervised (depending on the application: standard, valid, representative or acceptable) instances of the object.. Then, any deviation is efficiently detected and the part is accepted or rejected. If several models are used at the same time, the object can be also classified into one of a number of classes.
The specific goals sought are: increasing the efficiency and the parallelism, and reducing the cost of the processing units.
